|
Listen to this article
 |

The new MC600 is designed for reliable mobile manipulation, says MiR. Source: Mobile Industrial Robots
While humanoid robots are taking their first steps into industrial applications, ASTM International is working on standards for mobile manipulators. Its F45.05 Committee on Robotics, Automation, and Autonomous Systems is developing a standard designated as WK92144.
A mobile manipulator is broadly defined as an autonomous mobile robot (AMR) base with an attached multi-axis robotic arm. The ANSI/RIA R15.08-1-2020 standard defines a classification scheme for industrial mobile robots (IMR), which includes mobile manipulators as a class.
The goal of ASTM’s standard is to demonstrate the precision of a such a robot and provide a series of quantifiable tests for measuring the accuracy of the manipulator and mobile base’s movements. The research for the emerging testing standard is based on a National Institute of Standards and Technology (NIST) paper.

Standards efforts focus on definitions, testing
“We started this standards effort in 2014 or 2015,” said Omar Aboul-Enein, co-author of the NIST paper and an F45 committee member. “In many cases, there’s noncontinuous performance. For example, the arm and vehicle don’t move simultaneously for machine tending or assembly tasks. We needed terminology for discrete pose-constrained tasks.”
In 2022, ASTM International expanded its scope to include robotics and automation, he told The Robot Report. “NIST had tested noncontinuous performance with multiple robots, such as AGVs [automated guided vehicles] and then experimented with continuous systems for large-scale manufacturing, like for aircraft wings, ship bows, and wind turbine blades.”
With R15.08, ASTM has focused on AMR testing, with task groups for mobile manipulation, grasp-type end effectors, and robotic assembly, Aboul-Emein explained. The mobile manipulation group has more than 30 members.
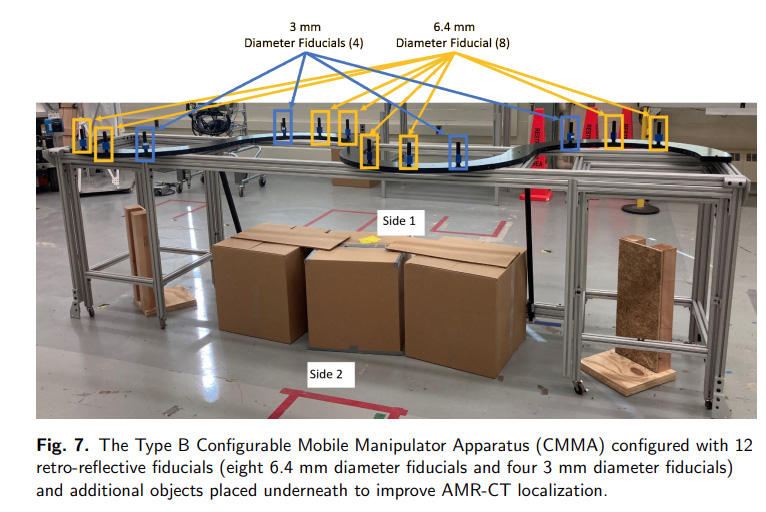
By supporting foundational tests for workpiece properties, ASTM wants to help industry create consistent documentation of robot configurations. Aboul-Emein described a configurable test apparatus for mobile manipulation that uses low-cost components and is designed to be easy to reproduce and allow for in-situ testing.
However, the new standards would not apply to end effectors, payloads, or fleet behavior. They could be used to develop simulations of robots and their behaviors, acknowledged Aboul-Emein.
“It definitely has potential, but there are always factors lurking in the real world, such as a dip in the lab floor or the weight of the arm when it’s fully stretched out to one side,” he said. “We’ve been working on items to assess mobile manipulators and measure their behavior, all based on consensus out of the committee. These standards are living documents.”
ASTM introduces testing table for mobile manipulators
The Robot Report also reached out to Aaron Prather, director of the Robotics and Autonomous Systems Program at ASTM International, for a more detail on the WK92144 standard and where it’s headed.
The organization‘s F45 committee is introducing a new testing table, a tool that helps show the precision of a mobile manipulator, linking its arm and base movements. The robot must try to maneuver around the table while its arm performs tasks on the surface. These tasks include tracking an S-shaped black area for welding or gluing and inserting pegs.
This image, provided by Prather, is an early prototype built by the F45 team to test the emerging standard. | Credit: Aaron Prather, ASTM
Operators can adjust the tabletop to stand at 90 degrees, tilt to 45 degrees, or lay flat at 0 degrees. To make the tests more challenging, they can attach a shaker that adds motion and vibrations.
“The table design will be standardized, and the committee will provide instructions on how everyone can build their table,” said Prather. “Several test standards are planned based on the table. The goal is to have NIST task boards and this new table be the basis for how we test new grasping/manipulation/assembly applications for accuracy and repeatability.”
“Also, expect to see our new Student Competition Challenges to use the boards and table,” he added. “This will help get students involved in how to use standards and send them out into the community with the knowledge on how to leverage these new test tools we are going to keep launching to ensure new robot systems can pass them.”
“Our hope is that we see humanoids and mobile manipulators having to show their results to help end users better understand capabilities and ensure they are getting the right system for their application,” Prather said.




Tell Us What You Think!