|
Listen to this article
 |
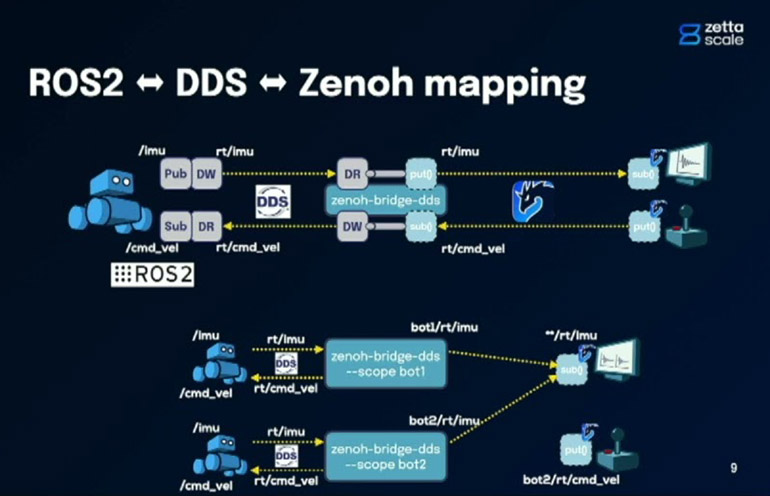
Zenoh is middleware designed to enable scalable data communication across technologies. Source: ZettaScale
While multiple industries could benefit from mobile robots, the standard Data Distribution Service or DDS middleware has difficulty keeping up in wireless environments, according to ZettaScale Technology Ltd. This limits communications and scalability, said the France-based company.
ZettaScale has developed the Zenoh protocol, which it said provides robust communication in dynamic environments for vehicles, Internet of Things (IoT) devices, and robots. In 2022, the company spun out of DDS research and development for traffic control in aerospace and military applications, explained Angelo Corsaro, chief technology officer and CEO of ZettaScale.
Last month, the Eclipse Foundation announced the release of Eclipse Zenoh 1.0.0, an open-source protocol to integrate communication, storage, and computation in embedded systems and across cloud platforms. The foundation and ZettaScale noted that the new release builds on years of work and real-world deployment experience.
DDS works well, with limits
In 2015, efforts to design a resilient protocol to replace IP for the next-generation Internet were still based on telephone circuit switching. DDS was optimized for its original intent, but it had limitations, noted Corsaro.
“Our team also did some of the early smart-city work, [such as] Nice in France and with Schneider and Cisco in Barcelona,” he told The Robot Report. “One struggle we had was that, for systems spanning from a microcontroller to a data center, we had to put together two to three different protocols for data flow. DDS wouldn’t fit on a microcontroller, and the wire protocol wasn’t designed for constrained networks.”
“The issue is DDS was used outside of its design space,” Corsaro explained. “When we designed DDS, the use case was a closed system a wired network, and the assumption that there was low packet loss. And that happens in a system that is well-dimensioned.”
“So DDS came out of naval combat management system, where you have a system that is completely well-dimensioned,” he added. “There is, on average, the 50% CPU and the network that is left empty. And everything is dimensioned so that you can use multicast and you don’t lose packet. Systems are powerful and symmetrical. In that context, DDS rocks, but if you move out of that context, then it gets complicated.”

Zenoh designed to manage data at rest and in motion
Corsaro said he wanted to solve two problems. The first was to develop a protocol that would work with low-power embedded systems and constrained networks.
“The other ideas was unifying the abstraction that we use for dealing with data in motion, so distributing data and data at rest, which means query,” recalled Corsaro. In efforts to decentralize data storage for “fog computing” in Barcelona, he found that protocols were needed to retrieve data distributed across the network.
“Zenoh removes the topological constraint on where to deploy the computation, so you can operate over arbitrary meshes at Internet scale,” Corsaro said. “This discussion of where we should put it — on the cloud versus the edge — becomes irrelevant because you keep the storage and compute where it makes sense, and the data always takes the shortest path.”
From telecom to ROS 2
The DDS researchers started working on Zenoh with funding from telecom companies, which enabled it to experiment and validate in the context of smart-city telemetry across 5G networks, said Corsaro.
“It was by accident that people started using it in robotics, because for us, we were really focused on telecommunications,” he noted. “When we started showing how you could use it with ROS [the open-source Robot Operating System], it really took off.”
As ZettaScale spun off, TG Tech Auto saw an opportunity to bring its protocols into the automotive space, and it partnered and became a shareholder.
“We see a huge convergence from both robotics and automotive, and Zenoh was adopted by General Motors’ uProtocol initiative,” Corsaro said. “It’s the convergence of architecture and technology. There are actually cars today in Asia that are actually running on ROS 2.”
ROS 2 is taking a lighter-weight, “code-first” approach, while the AUTOSAR consortium is working on a structured exchange and interoperability format. However, ROS 2 needs to come up to automotive certification standards, acknowledged Corsaro.
Companies such as Intrinsic and Apex.AI are working on bridging the platforms. Intrinsic is using Zenoh with ROS 2 Jazzy Jalisco.
“It’s a very interesting time,” Corsaro said. “Imagine if the same protocol could be used for both robotic platforms and autonomous driving. We see robotics as essentially the early adopters.”
ZettaScale demonstrated Cyclone DDS and Zenoh, Version 1.0.2 of which is now available, at ROSCon last month in Kyoto, Japan.
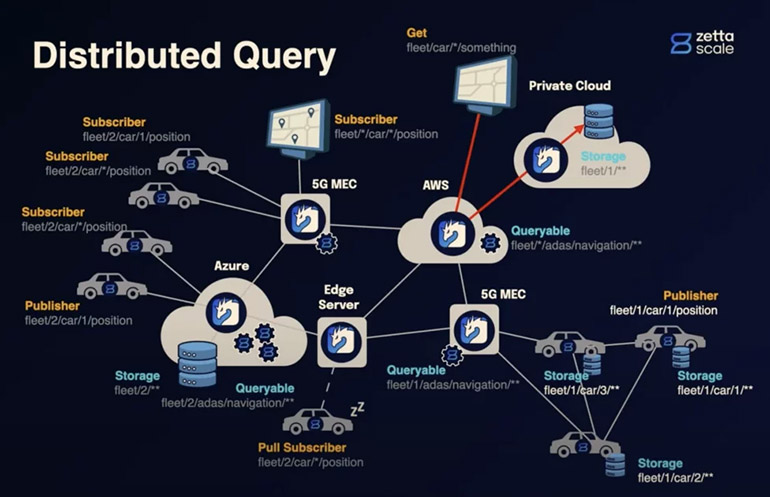
Zenoh streamlines communications, adaptively routes data, and distributes storage for efficient fleet management. Source: ZettaScale
ZettaScale continues automotive work
Early adopters of Zenoh include major automakers such as Volvo and smart-city companies.
Eclipse Zenoh 1.0.0 includes shared memory and zero-copy support, advanced end-to-end protection, high-performance access control, and specific extensions for robotics and automotive protocols.
“We’ve shown how we can handle real-time video of a self-driving car and put recognition in the loop,” said Corsaro. “You don’t want to go through the network when sending lidar images, point clouds, or big images, but few people were using the zero-copy API [application programming interface] that was in ROS.”
ZettaScale is working closely with partners in Japan and Europe, and it has support personnel in the U.S.



Tell Us What You Think!