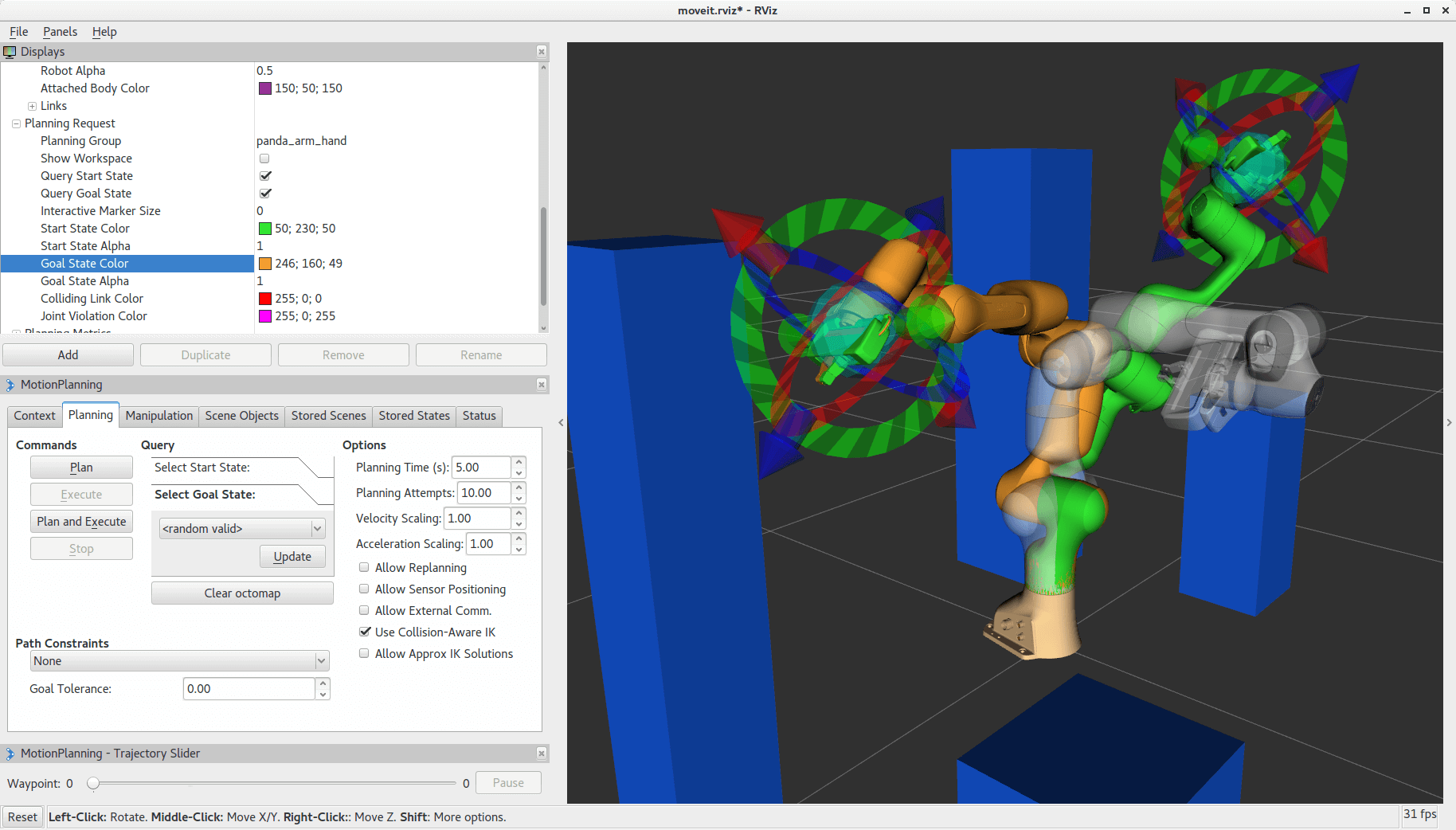
MoveIt 2 includes support for the Rviz motion-planning plugin. Source: PickNik
PickNik Inc. last week announced a new version of the MoveIt open-source software for controlling robot arms. MoveIt 2 Beta works with ROS 2 to enable faster, more reactive planning through realtime control, said the Boulder, Colo.-based company.
MoveIt was initially developed at Willow Garage, which was started in late 2006 by Scott Hassan, who had worked with Larry Page and Sergey Brin on the predecessor to the Google search engine. Over the past decade, MoveIt has become the most widely used open-source software for developing robotic manipulation applications, evaluating designs, and building integrated products, said PickNik.
Academics and industrial developers use the software to direct robotic arms to pick up things, interact with them, and move them to new locations. MoveIt also includes tools and capabilities for startups to build robotics applications that would have been difficult to create because of cost constraints.
Open-source company PickNik has led development of MoveIt 2 in coordination with the efforts around ROS 2, the latest version of the Robot Operating System. It said its partners include Intel, Amazon, Open Robotics, and many contributors around the world.
“With this release, MoveIt is ready to further expand and meet the needs of demanding applications across the industry,” stated Dave Coleman, lead maintainer of the MoveIt Project and CEO of PickNik Robotics. “With the robotic arm market expected to exceed $39.2 billion by 2024, PickNik Robotics is taking a new approach to supporting this market by continuing to build open-source products with our partners. It’s an exciting alternative to the model of traditional vendor lock-in software.”
MoveIt 2 has most of the core functionalities of its predecessor, including motion planning, collision checking, trajectory execution, inverse kinematics, and visualization in RViz, according to a discussion thread on ROS Discourse. However, as of two weeks ago, some features, such as benchmarks, robot interaction, and plugins, were not yet enabled because of a lack of funding, wrote Henning Kayser, an applied robotics scientist at PickNik Robotics.
ROS 2, MoveIt 2 gain corporate support
“While most tech fields have been influenced by the open Internet, the vast majority of robots are still coded in walled gardens using closed-source software,” said PickNik Robotics. “This a problem because creating truly general robot software for even trivial tasks is so difficult that no single person or institution can hope to do it on its own. MoveIt’s supporters believe that open-source, collaborative development is the best hope for robust, safe and secure robotics software.”
After years of use among academics, startups, and government-sponsored efforts such as NASA’s Robonaut program, ROS and MoveIt 2 have recently received industry attention. MoveIt is the third most popular package in ROS, according to PickNik. Companies such as Microsoft, Toyota, Samsung, and LG have invested in open-source robotics development.
Companies using MoveIt include Fetch Robotics, Franka Emika, PAL Rbotics, Realtime Robotics, Acutronic Robotics, and Kinova.
“MoveIt is a key component of the ROS 2 ecosystem, and we are happy to see the release of MoveIt 2,” said Tully Foote, ROS platform manager at the Open Source Robotics Foundation. “The capabilities provided by MoveIt open up many applications for the community.”


Truly inspires me to keep doing my robotic studies as an amateur